lec-23 Structured Support Vector Machine
Table of Contents
1 Structured Support Vector Machine
1.1 上节课回忆
重新梳理 Structure Learning 相关概念 Unified Framework
| Training | Inference(Testing) |
|---|---|
| Find a function F: | Find a y~ : |
| F: X * Y -> R | Given an object x |
| evaluate how compatible the | y~ = arg maxF(x,y) |
| objects x and y is |
虽然看起来这个 Framework 很简单,但是你需要回答【神之三问】:
| Problem1:Evaluation | what does F(x,y) look like? |
|---|---|
| Problem2:Inference | How to solve the "arg max" problem |
| Problem3:Training | Given training data, how to find F(x,y) |
Example Task: Object Detection
============================
在影像处理领域还有很多比 bounding-box 更复杂的问题,比如【描边】【动作】

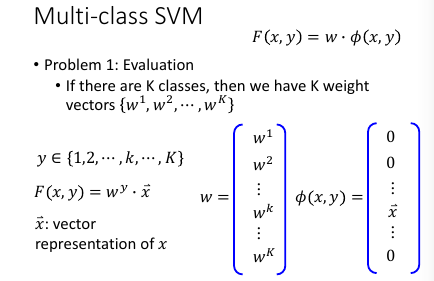
Problem 1: Evaluation, φ
这一步需要解决:φ
上节课已经说了,如果能对 F(x,y) 做一些假设,能让我们的任务变的容易一些。 ===> F(x,y) is linear
| x | an image |
| y | box |
| (x,y) | boxed-image |
| φ(x,y) | features of boxed-image |
| F(x,y) | compatible of box and iamge |
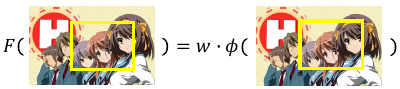
what if F(x,y) is not linear? 这方面的研究还很少,大部分都需要这个假设,否则很多推导都不成立了。所以 F(x,y) = W•φ(x,y) 依然是我们所有讨论的根据。所以 Problem 1 的核心问题还是 feature extraction 得到 φ
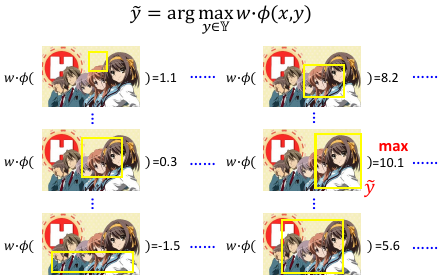
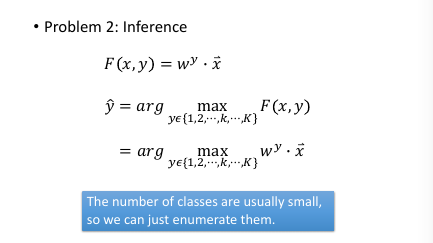
Problem 2: Inference, y~
这一步需要解决:y~
 至于该怎么穷举,这个需要自己想出另一种算法来解决这个问题,可以效率的解决。这里是传统算法的领域。
至于该怎么穷举,这个需要自己想出另一种算法来解决这个问题,可以效率的解决。这里是传统算法的领域。
- Object Detection • Branch and Bound algorithm • Selective Search
- Sequence Labeling • Viterbi Algorithm
- The algorithms can depend on φ(x,y) 以上所有這些算法都依赖 φ(x,y), 不同的 φ(x,y) 就需要不同的算法换言之,這些算法【不普适】
- Genetic Algorithm 基因算法是可以【普适】,但是找出的解不够精准
- Open question: • What happens if the inference is non exact? 如果‘从无限多个 y 中找出一个可以让分数最大的’ 这件事是做不到的,该怎么办呢?这件事情影像有多大呢?这件事情也是学界研究很少的领域
所以根据已上所说,我们暂时只能假设 problem 2 已经解决,至于解决方法,case to case.
Problem 3: Training, W
这一步需要解决:W
1.2 Outline
下面的讨论,暂时忽略 problem 1 and 2, 集中精力解决 problem 3.
- Separable case
- Non-separable case
- Considering Errors
- Regularization
- Structured SVM
- Cutting Plane Algorithm for Structured SVM
- Multi-class and binary SVM
- Beyond Structured SVM (open question)
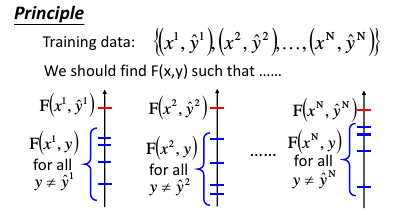
1.3 Separable case
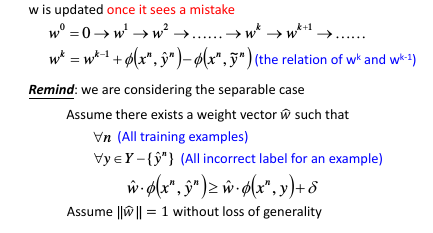
假设映射到 W 上之后的【最大分数点】与【其他分数点】是可以分开的这件事情用数学表达式和图像表示如下:

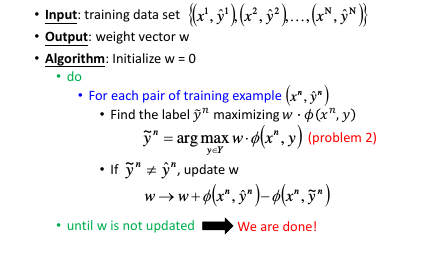
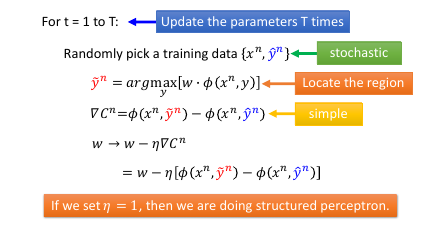
有了这个假设之后,我们就可以使用【Structured perceptron 算法】来找到 problem3 的核心问题:W
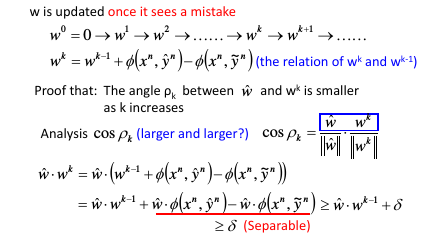
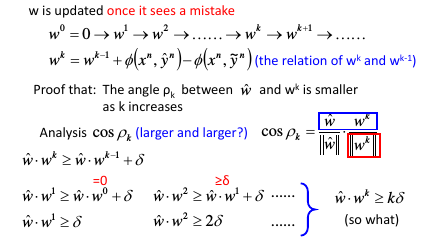
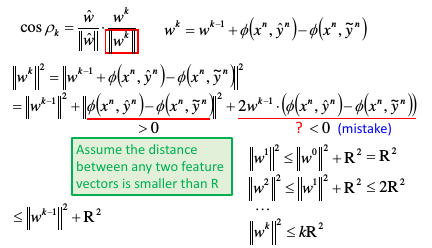
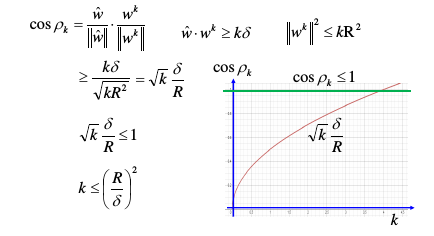
1.3.1 算法更新次数的数学推导
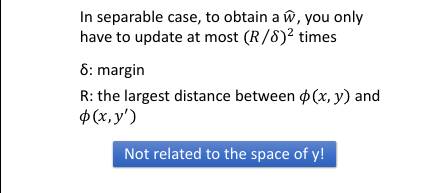
先给结论:只需要最多更新 W 【(R/δ)的平方次】,就可以得到最终 W
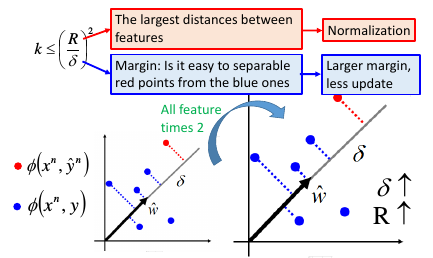
1.3.2 How to make training fast
单纯的倍化 δ 比如 –> 2*δ 并不会让算法更快,因为这也会让 R–> 2*R
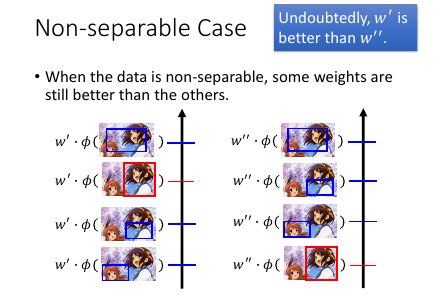
1.4 Non-separable case
如果没有一个 w 可以把 φ(x,框对) 和 φ(x,瞎吊框) 分开我们依然可以衡量哪些 w 更好---
让 φ(x,框对) 的分数(W•φ(x,框对)) 更高的 w 是更好的 w
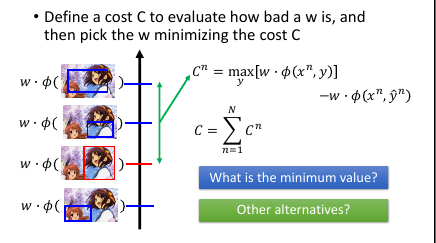
1.4.1 Defining Cost Function
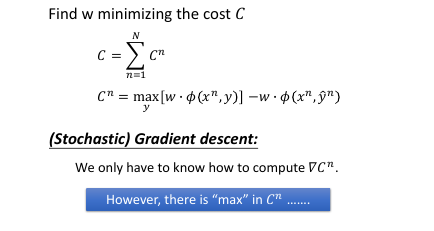
定义 cost-fn 来衡量一个 w 的好坏: cn = 第 n 个 image, φ(xn,所有框法)最高的分数 - φ(xn,框对)的分数 cn = max[w.φ(xn,y)] - w.φ(xn,y~n) C = c1 + c2 + c3 … + cN (假设总共 N 个图片) 为甚么使用 max[w.φ(xn,y)] ,而不是其他方法?因为这是 problem 2 给出的答案,而我们之前假设 problem 2 已经解决所以 max[w.φ(xn,y)] 是‘已知’的。就不用再额外制造问题了。
1.4.2 SGD
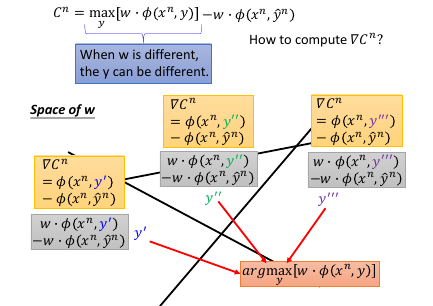
因为 W 是一个 vector, 假设说 w 是二维度的,那么所有可能的 w 就组成一个平面,这个平面被 max 切割成好几块,如果某一个 w 落在中间那块,那么得到的最大分数就是 y'' 贡献的,如果 w 落在左下角那块,那么得到的最大分数就是 y' 贡献的。
相当于用贡献最大分数的 y' y'' y'''… 来给不同的 w 分组。
在每一个 region 里面他的 max-fn 是可以非常轻易的算出来的---直接就可以去掉 max 符号。 在边界上是没法微分的,但在 region 内部对 w 微分是很简单的。
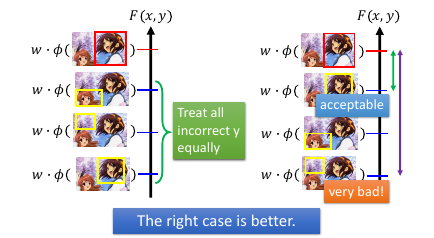
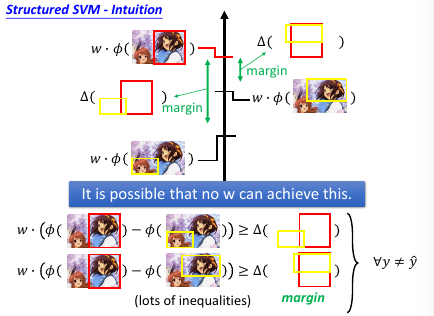
1.5 Considering Errors
φ(x,瞎吊框) 之中也有好跟不好的:按照他离 φ(x,框对) 的 相似度 来区分优劣
如果没有一个 w 可以把 φ(x,框对) 和 φ(x,瞎吊框) 分开我们依然可以衡量哪些 w 更好---
让 φ(x,框对) 的分数(W•φ(x,框对)) 更高的 w 是更好的 w
现在对 w 的期望更高: w 应该给与的功能是【像是一种排序】
w 应该让越像框对的分数越高,越不像的分数越低。
这样做还可以给整个 model 带来更高的稳定性!
>>> SVM 感觉初现
回忆 SVM 的感觉:不但分的对,还要分的好。 SVM 的 loss-yf 图像可以看到,当 y 和 f 同号但是 yf 乘积 < 1 也就是 f 比较小的时候,这时候 loss 仍然不是最小值,只有当 yf >=1 的时候才是最优结果所以 SVM 有让 f 在与 y 同号的基础上绝对值越大越好的倾向 — margin 越大越好
这里也是一样,不但要把【框对】和【瞎吊框】 分开,还要对 [瞎吊框]分级
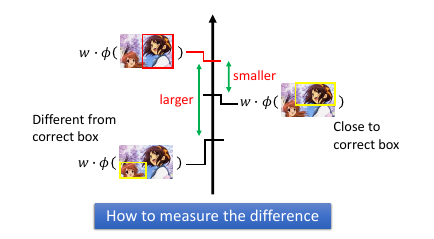
如何定义相似度?
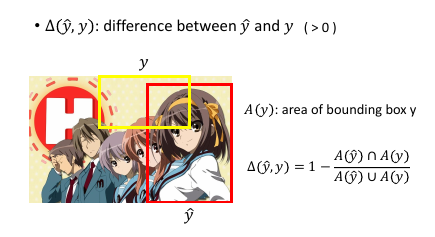
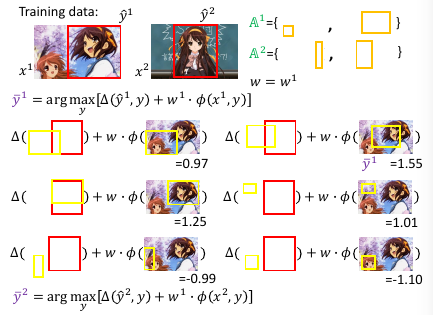
1.5.1 Define Error Function
一件 task-dependent 定义:这里使用面积来定义
Δ = 1 - 相交面积/相并面积 像我的---> 0 <= Δ <= 1 <---- 不像我的
w.φ 是用来衡量【框和图】之间是否匹配:选皇帝Δ 是用来衡量【框和框】之间是否匹配:皇帝带上亲属 w.φ 的意思就是(不管像谁)让框的最好的往前排,其他无所谓Δ 的意思就是(不管分数)让像我的往前排,不像我的往后排
>>> 相似性 similarity
相似性到目前为止:
两个向量是否相似:inner-product 两个分布是否相似:cross entropy 自己跟自己是否相似:how concentrate(cross entropy) 两个分布的距离是否相近:KL divergence(公式与 cross entropy 有点像) ===> 两个 box 的相似度:Δ = 1 - 相交面积/相并面积
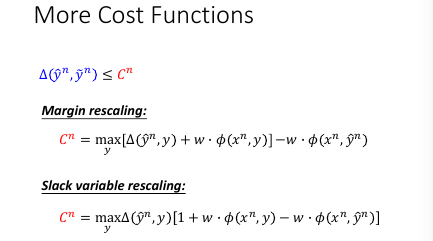
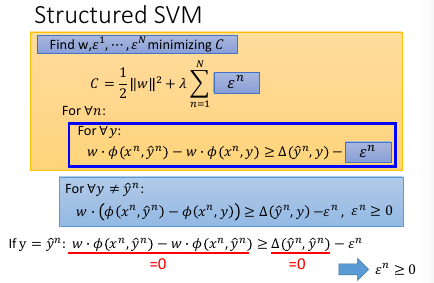
1.5.2 Another Cost Function
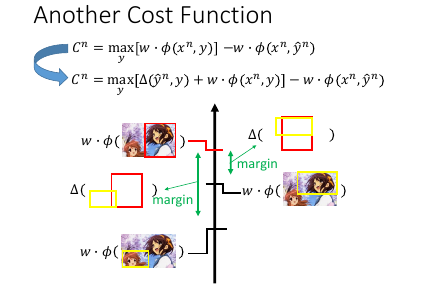 什么时候 Cn 会最小呢?
什么时候 Cn 会最小呢?
- 【框对的】分数要比其他【瞎吊框】的分数要高
- 而且要高出一个 error-fn 所形成的 Δ 值
满足这两个条件,Cn 才会最小。
>>> 改变的 problem 2
这样,Problem 2 的计算要改变了: max(所有框的分数) =======> max(与皇帝相似度 + 所有框的分数)
所以 Δ 的定义要谨慎,他容易让 problem 2 的计算变复杂
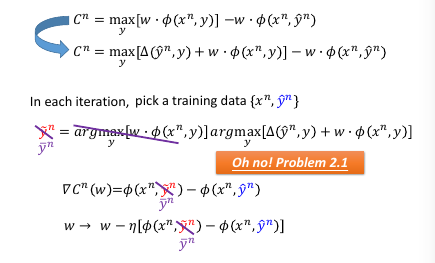
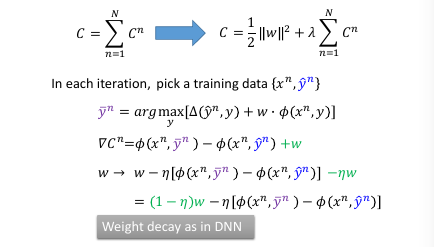
1.5.3 Gradient Descent
1.5.4 Another viewpoint
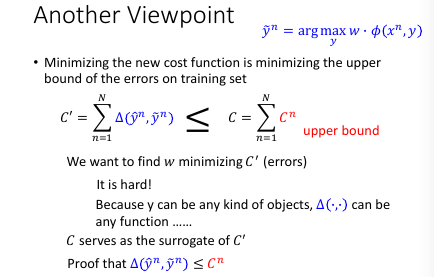 一种妥协,通过 minimize C 找到的 w 未必 minizie C', 但也不会让他很大。
一种妥协,通过 minimize C 找到的 w 未必 minizie C', 但也不会让他很大。
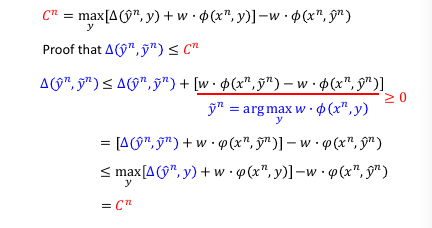
这里证明为甚么是 upbound 方法 1: margin rescaling
方法 2: slack variable rescaling
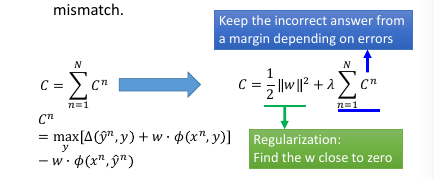
1.6 Regularization
Training data and testing data can have different distribution. w close to zero can minimize the influence of mismatch. Keep the incorrect answer from a margin depending on errors
1.7 Structured SVM
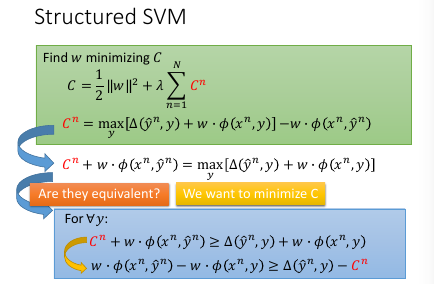 >>> 又见 max 不一样
>>> 又见 max 不一样
- cn + w•φ = max
- cn + w•φ > ∀y
这两件事情是【完全不一样】的,千萬注意 max 带给你的迷惑二式 是没有上界的一式 是 有上界的
>>> 又见 minimize 约束 >
刚才说明了 max ≠ >∀但是这里是 'Find w minimizing C' 用 minimize 规定了一个 tight upbound max = minimize(>∀)
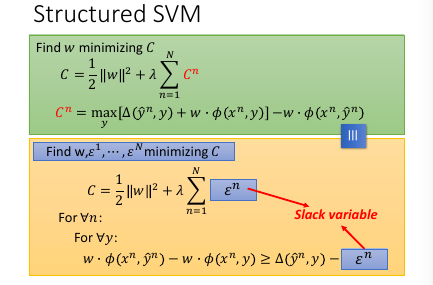 cn -> slack variable
cn -> slack variable
1.7.1 Slack variabel(亢龙有悔)
放宽对 w 的限制,防止找不到需要同时满足这么多条件的 w
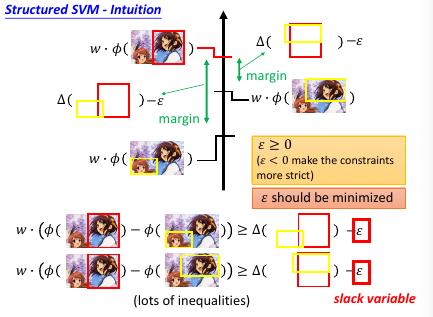 ε 的作用是放宽对 w 的限制,所以叫做 slack variable
ε 的作用是放宽对 w 的限制,所以叫做 slack variable
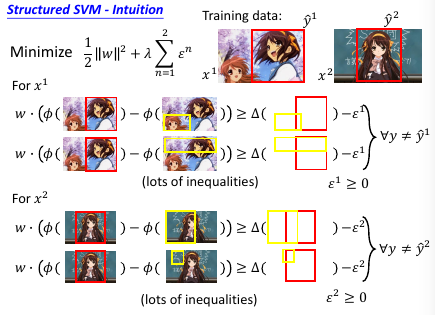
总结变化:一开始是要求 w 可以让 框对 分数最高然后变成 w 可以让 框对 分数越高越好然后变成 w [不但]可以让 框对 分数越高越好,还可以让 像框对 的分数更高亢龙有悔 也不同那么较真,给一个放宽条件
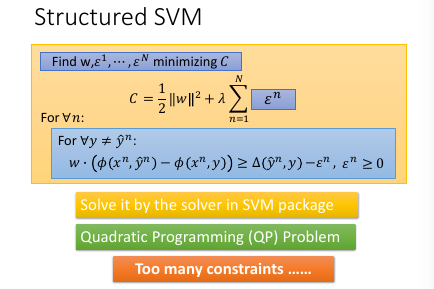 条件太多了,我们怎么办?
条件太多了,我们怎么办?
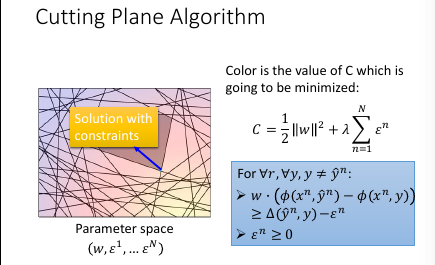
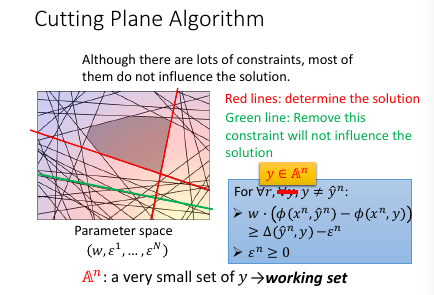
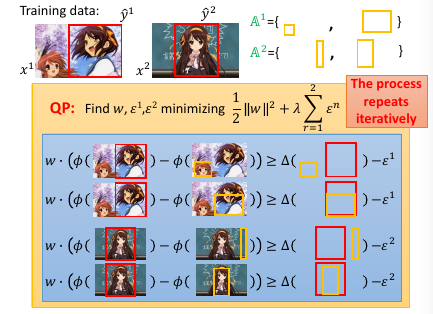
1.8 Cutting Plane Algorithm for Structured SVM
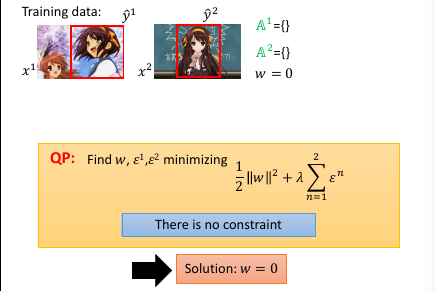
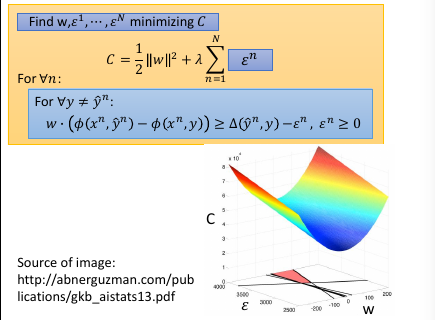 如果不看 constrain, 那么 w=0,ε=0 就可以得到 minimization C
可以根据这个 C = 1/2w2 + ε 画出函数图像,
如果不看 constrain, 那么 w=0,ε=0 就可以得到 minimization C
可以根据这个 C = 1/2w2 + ε 画出函数图像,
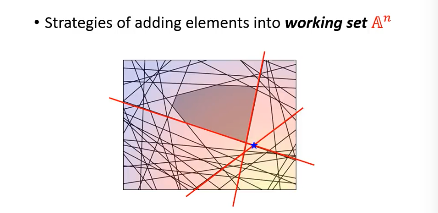
再来看 constraint: data 都是已知的每一个 data 进来都会构造一个关于 w 和 ε 的线性表达式,也就在 w 和 ε 坐标系中画了一条线,因为 constraint 都是不等式,这条线就规定了 w 和 ε 只能在线的一边取值。有多少 y 就有多少 constraint ,也就有多少条线。他们共同在 w 和 ε 平面分割出一个空间,w 和 ε 只能在这个空间中取值。
 h
h
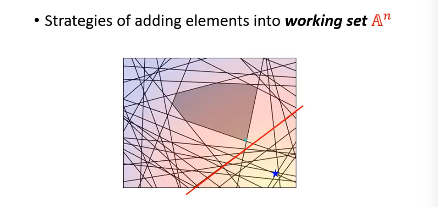
虽然线条很多,但真正起作用的线条就那几条,比如下图中红色的线条是需要的,而绿色可以删掉不看。从这个角度想,本来是一个 y 一个 constrait 一条线有无数个 y, 但是很多线条不需要, 现在就减少了问题空间: working set: 真正有用的线条的集合 >>>> 注意有几个 working-set
这里不同的图片 x,对应不同的一堆框法 y,也就对应一堆线条,也就对应一个 working-set 所以
一个样本对应一个 working-set. x1 ---> working-set1:A1 x2 ---> working-set2:A2 x3 ---> working-set3:A3
…
n 个 x ---> n 个 A num of samples = num of working-sets
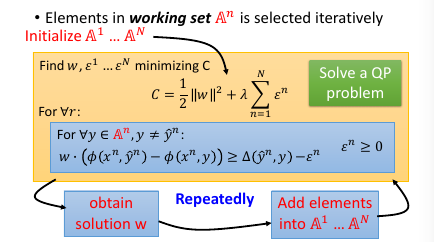
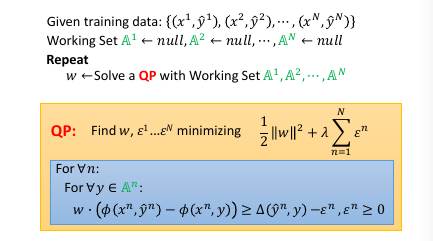
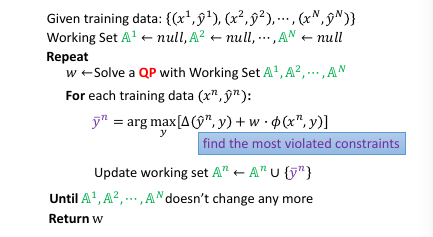
cutting plane algo: working set
- 初始化 working-set 为空集
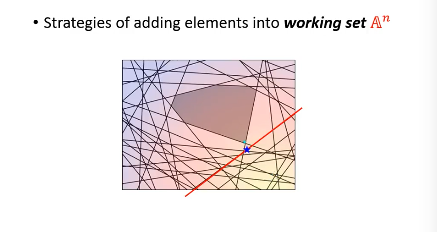
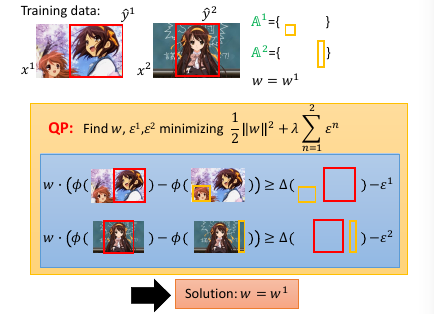
- 然后解这个最小化问题,获得一个 w.
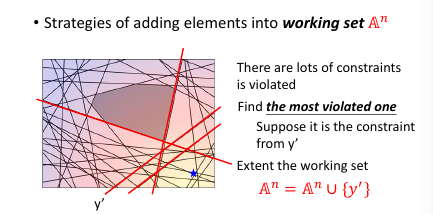
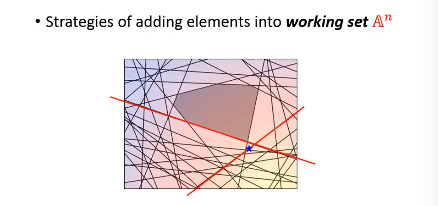
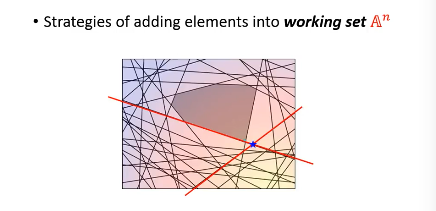
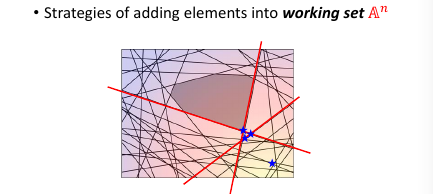
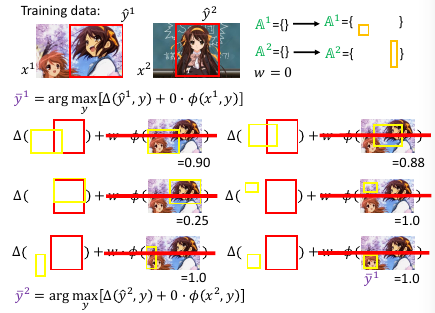
- 然后用这个 w 【检查】所有线条,看违反了哪些线条关于【在某一边】的规定,从這些线条中挑出一个违反最严重的加入 working-set
- goto step 2
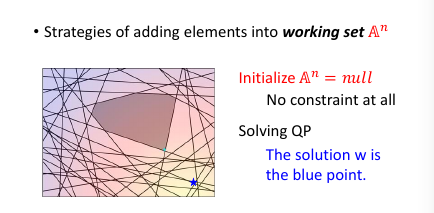
 到这里完成步骤 2.
然后【检查】找到我这个点,违反了哪些线条的规定找到最违反的那一条,把他加入 working-set 作为新的限制条件。然后继续执行步骤 2, 找到下面这个新的解
到这里完成步骤 2.
然后【检查】找到我这个点,违反了哪些线条的规定找到最违反的那一条,把他加入 working-set 作为新的限制条件。然后继续执行步骤 2, 找到下面这个新的解
1.8.1 如何衡量【最违反】
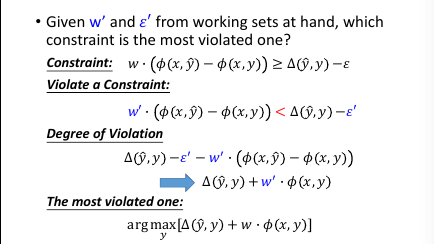 注意到: ε' 和 w'•φ(x,y^) 这两项都是已知值,最大化时可以不用考虑
注意到: ε' 和 w'•φ(x,y^) 这两项都是已知值,最大化时可以不用考虑
1.8.2 Cutting Plane Algo 完整的看
1.8.3 算法实例 object detection
还可以进一步的为 最大违反 设置一个 threshold, 也就是对最大违反 进行一个过滤,只要大于某个阈值的 最大违反 才会放到 working-set 中。
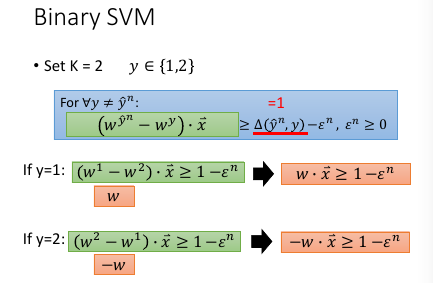
1.9 Multi-class and binary SVM
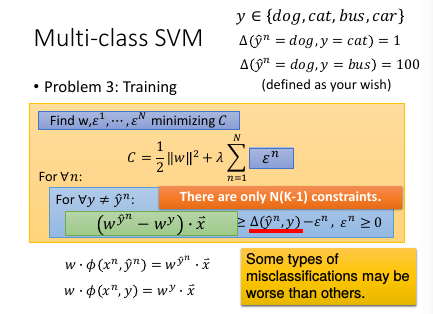 可以调整哪些 case 比较不容易被 miss recognize
可以调整哪些 case 比较不容易被 miss recognize
1.10 Beyond Structured SVM(open question)
Ref: Hao Tang, Chao-hong Meng, Lin-shan Lee, "An initial attempt for phoneme recognition using Structured Support Vector Machine (SVM)," ICASSP, 2010 Shi-Xiong Zhang, Gales, M.J.F., "Structured SVMs for Automatic Speech Recognition," in Audio, Speech, and Language Processing, IEEE Transactions on, vol.21, no.3, pp.544-555, March 2013
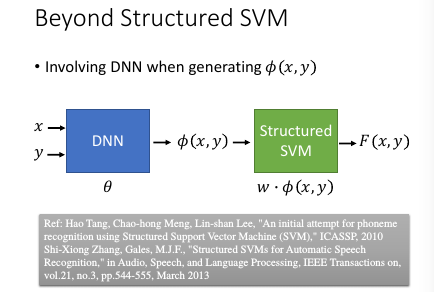 你要让 structured svm 很厉害,就必须定一套很好的 features
你要让 structured svm 很厉害,就必须定一套很好的 features
台大是第一个把 structured svm 用在语音识别的团队 对于某些你不知道该怎么提取 feature 的情况,就应该交给 DNN
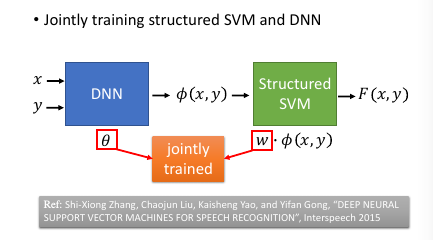 进展:本来是先 learn 好一个 DNN,然后再接上 SSVM,但是其实可以把两个放在一起 learn. 如果 SSVM 是用 QP 来优化,那确实不好跟
DNN 放在一起,但是如果都用 GD 来优化的话,就可以联合起来 learn.
进展:本来是先 learn 好一个 DNN,然后再接上 SSVM,但是其实可以把两个放在一起 learn. 如果 SSVM 是用 QP 来优化,那确实不好跟
DNN 放在一起,但是如果都用 GD 来优化的话,就可以联合起来 learn.
Ref: Shi-Xiong Zhang, Chaojun Liu, Kaisheng Yao, and Yifan Gong, “DEEP NEURAL SUPPORT VECTOR MACHINES FOR SPEECH RECOGNITION”, Interspeech 2015
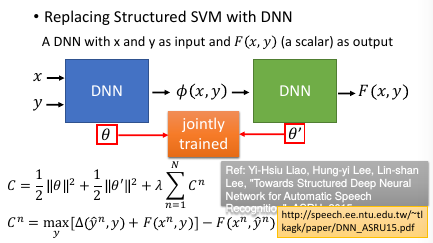 再进展:都变成 DNN,都用 GD
再进展:都变成 DNN,都用 GD