lec-09 Recipe of Deep Learning
Table of Contents
1 Recipe of Deep Learning
Deep learning, 虽然参数很多,但确实不容易 overfitting。 K-NN, DecisionTree 训练集上一做就是 100%正确,这才是 overfitting。 DL 在训练集上就不太容易获得好的结果,所以即便在测试集上也不好,这个也不算是 overfitting
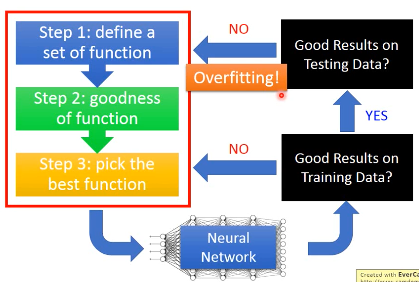
如果出现 overfitting,调整了这三个训练步骤之后,还是要再检查一遍训练集是否足够好。
1.1 Do not always blame Overfitting
下图的 56-layer 并没有 overfitting,因为训练集和测试集都是这样的表现
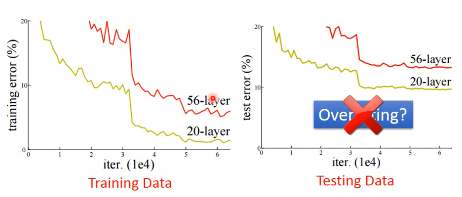
在做 DL 的时候,有太多太多的可能性让你的结果是不好的:
- local minimum
- saddle point
- plateau(高原:低斜率,但高)
这个并不是 overfitting,也不是 underfitting,就是没有 train 好。
1.2 「针对训练 or 测试」
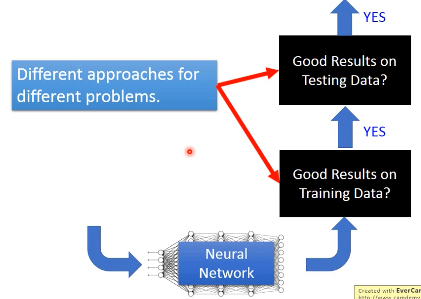
在 DL 中有两个问题:Testing 不好 和 Training 不好。 eg. Dropout for testing data ONLY
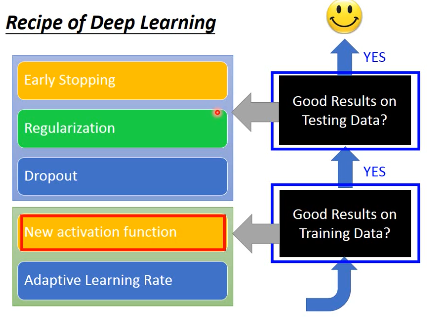
2 Bad results on Training Data
2.0.1 New Activation Function
如果是训练集上效果不好,有可能是 function-set 不行,也就是 net structure 没设计好。比如 激活函数不好
2.0.2 Hard to get the power of Deep
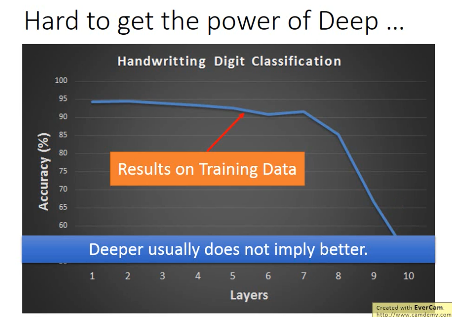
2.0.3 为什么 layer 越多,正确率不增反降?
一个可能的原因是:梯度消失 and 梯度爆炸
2.1 Vanishing Gradient Problem
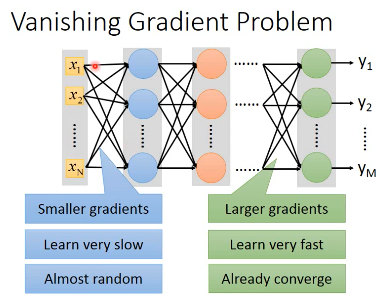
input layer 附近的参数 w 对于
/ loss function 的微分会非常小.
| |
| |
| | 如果设定相同的 learning
| | rate with下面
----------- | |
w near input | v
layer just | 参数 w update 非常慢
random; while |
w near output <|
has converged | output layer 附近的参数 w 对于
----------- | loss function 的微分会非常大.
| |
| |
| | 如果设定相同的 learning
| | rate with上面
| |
\ v
参数 w update 非常快
2.1.1 sigmoid 会衰减变化量
backpropagtion 的意义是用梯度,也就是微分。求的是某一个 w 的增加量对于 loss-fn(cross-entropy)的变化量的比值:
\(\frac{\partial{C}}{\partial{w}} = \frac{\bigtriangleup{C}}{\bigtriangleup{w}}\)
但是由于 sigmoid 函数对于·「差距的衰减」作用, 如下图所示:
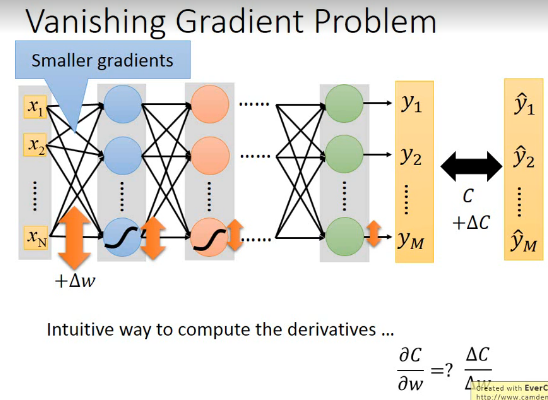
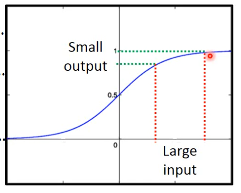
导致越靠近 input-layer 的 w 的变化量: \(\bigtriangleup{w}\) 所带来的计算结果(will contribute to finall loss)每经过一个神经元(sigmoid)都会变小,所以随着经过的 layer 越来越多,更新这些 w 对于 output layer 的影响越来越小,所以最后 output:y' 几乎是不变的。所以 C 也几乎是不变的 — \(\bigtriangleup{C}\) 几乎为 0。 所以
for w near input layer:
∂C/∂w = every SMALL
then w near input layer update very small each time, for a long run-time it's still random
反之靠近 output-layer 的 w 的变化量:∂w 由于经过的神经元很少,衰减很少,对于 output-layer 的影响就大,∂C 就大。所以
for w near output layer:
∂C/∂w = every LARGE
then w near output layer update very large each time, for a short run-time it's converged, but it converged based on the random w near input layer, although converged, lead to bad prediction.
2.1.2 如何解决:更换激活函数为 ReLU
z - input a - output
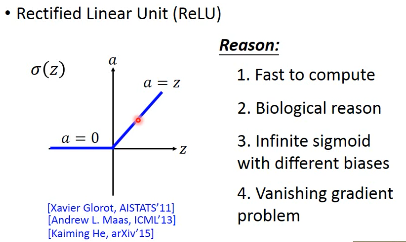
- 对于那些输出为 0 的神经元,根本不会影响最后一层的输出
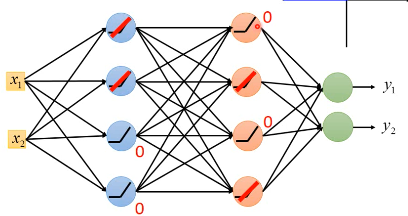
可以直接拿掉
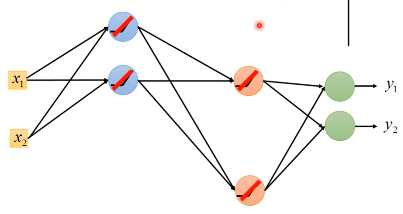
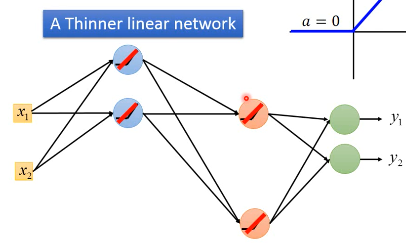
- 对于那些输出不为零的神经元,整个构成一个瘦长的线性网络
 这里就不存在·「差距衰减」的问题,但是还有两个问题:
这里就不存在·「差距衰减」的问题,但是还有两个问题:
- 我们并不喜欢 linear network 这种模型太弱了。
- ReLU 没办法微分。
其实这两个问题都不是问题:
- 联合起来当 x 取值较大的时候并不是 linear network
- ReLU 只在输入为 0 的位置不可微分,但很少遇到需要这里的微分。
2.1.3 ReLU - variants
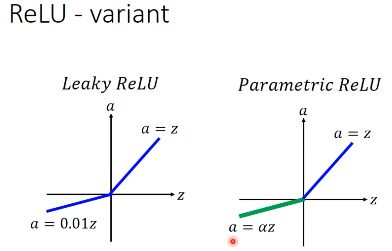
Leaky ReLU and Parametric ReLU
激活函数不一定要事先指定 ===> 对 ReLU 再次进化
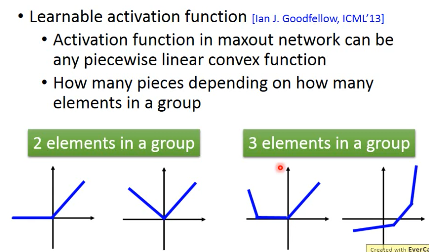
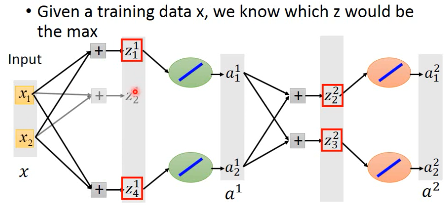
2.1.4 ReLU - advanced: Maxout
Learnable activation function 激活函数是自动学出来的
- group
哪些 value 会 group 在一起是事先决定的。每个 group 内的元素个数可以随便选。
- 选 max 作为输出
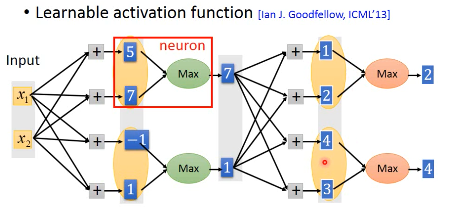
就不加 activate-function 了。 ReLU is a special cases of Maxout
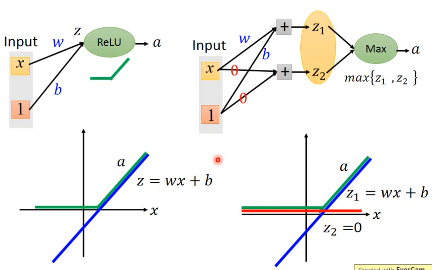
2.1.5 Maxout is more powerful
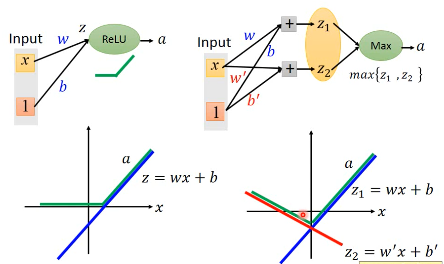
Learnable activation function
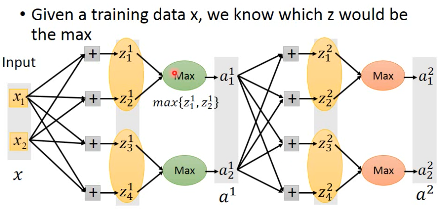
2.1.6 How to train Maxout network
Maxout 没法微分,这个怎么用 Gradient 来训练呢?
没有接到的部分,就可以直接拿掉,当你一个输入进来,之后其实他就是一个细长的 linear network, 你根本不需要考虑 Maxout 的拐点没法微分的问题
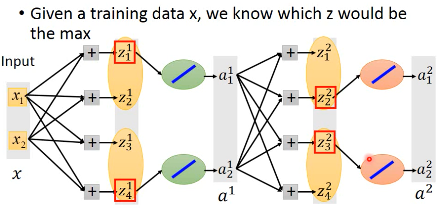
所以你需要 train 的不是 Maxout,而是这个 linearNetwork
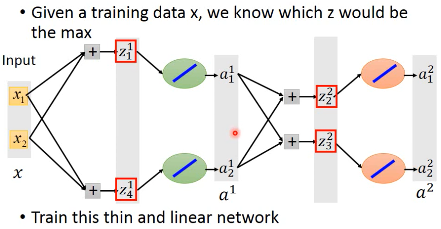
但是,好像那些被删除的链接的 weight 怎么办?他们没有被 train
当你给他不同的输入时(x),maxout 会选择各种不同的链接,所以概率上每一个连线(weight)是都会被 train 到的。
Maxout 和 Max-pooling(CNN)是完全一样的。
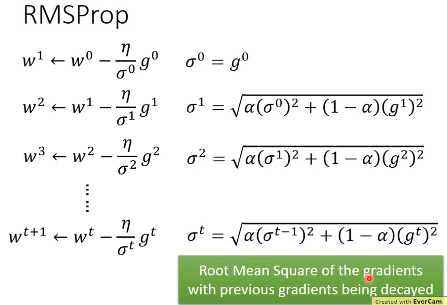
2.2 Adaptive Learning Rate: RMSProp
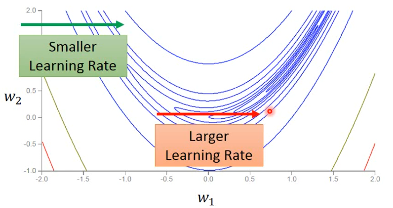
Error surface can be very complex when training NN即便在同一个方向上 learning rate 也必须快速的变动(adagrad 在某一个方向(dimension)的 learningrate 是固定的)
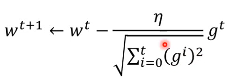
review grad (下图中去掉根号部分就是 gradient-descent)
review AdaGrad(dimension-wise + 2nd derivative)
学习率从原来的·「除以 1」变成·「除以平方和开根号」
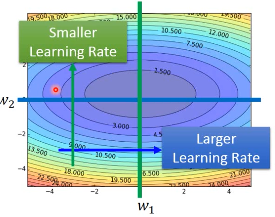
Error surface can be very complex when training NN即便在同一个方向上 learning rate 也必须快速的变动(adagrad 在某一个方向(dimension)的 learningrate 是固定的)
Adagrad 进阶版:
RMSProp根号里面引入·「gt 的可调节权重」--- α手动设置,一般设置个 0.9 之类的。 α小---倾向于相信新的 gradient 告诉你的曲线的平滑或陡峭的程度。 α大---倾向于相信以前的 gradients
| adagrad | RMSProp |
| Root Mean Square | RMS with previous gradients being _decayed |
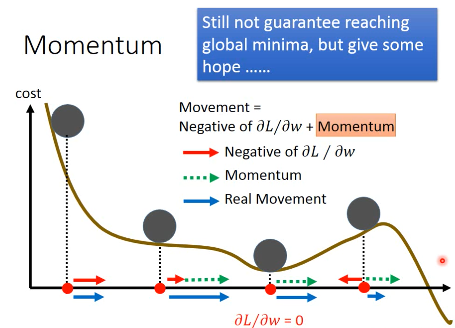
2.2.1 Hard to find optimal network parameters
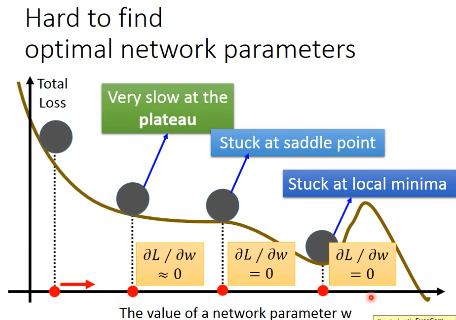
- Very slow at the plateau
- Stuck at saddle point
- Stuck at local minima
不用太担心 local-minimum 的问题,其实在 error-surface 上没有太多 local-minimum 的情况。因为如果你是 local-minimum 你就必须在每一个 dimension 都是如上图的形状,假设某一个参数 w 相对 Loss-fn 是这种形状的概率是 p,因为 NN 参数非常多,那么 1000 个 w 同时出现这种形状的概率是 p1000 参数越多,local-minimum 出现的概率越低。
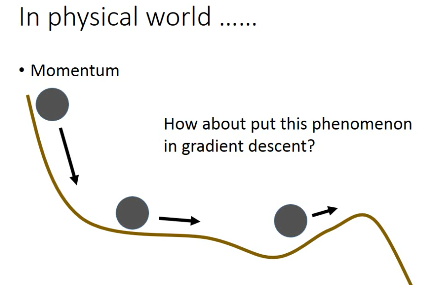
将惯性引入 GradientDescent
2.2.2 Momentum
Review: Vanilla Gradient Descent
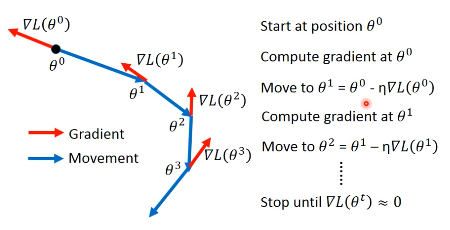
加入惯性 movement 之后
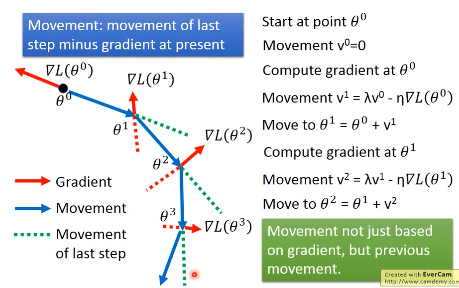
Movement: movement of last step minus gradient at present 引入·「惯性的权重参数」— λ, λ大就代表更看重惯性,λ小代表更看重当前的 Gradient
| GradientDescent | Momentum(v) |
|---|---|
| w2 = w1 + (-ηg2) | v2 = λv1 + (-ηg2) |
| w2 = w1 + v2 | |
| v0 = 0 |
vi is actually the weighted sum of all the previous gradient:
∇L(θ0),∇L(θ1),∇L(θ2),…,∇L(θi-1)
v0 = 0 v1 = -η∇L(θ0) v2 = -λη∇L(θ0) - η∇L(θ1) …
越之前的 gradient 的 weight 越小
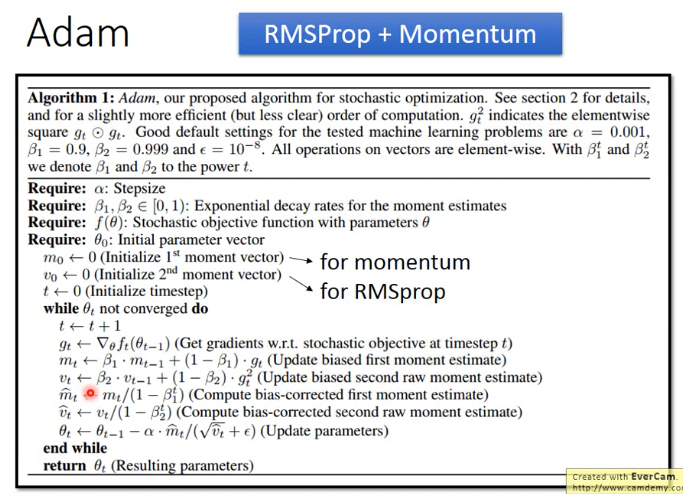
2.2.3 Adam(= RMSProp + Momentum)
| adagrad | RMSProp |
| Root Mean Square | RMS with previous gradients being _decayed |

| GradientDescent | Momentum(v) |
|---|---|
| w2 = w1 + (-ηg2) | v2 = λv1 + (-ηg2) |
| w2 = w1 + v2 | |
| v0 = 0 |
3 Bad results on Testing Data
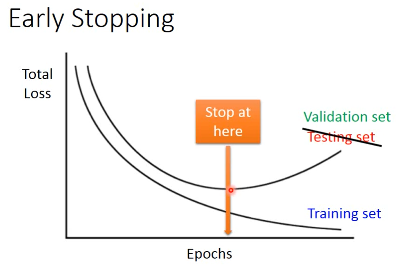
3.1 Early Stopping
Early Stopping 和 Regularization 是普适的做法,并不只针对 NN, Droput 是针对 NN 的做法
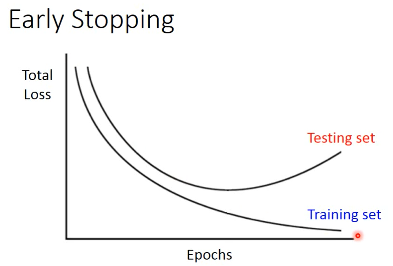
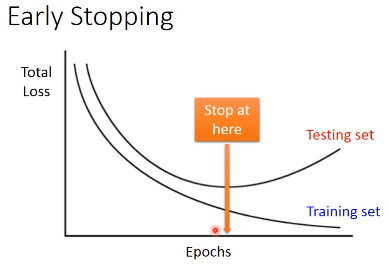
注意,因为 Testing set 是未来的未知数据,所以这里只能通过 验证集 来模拟
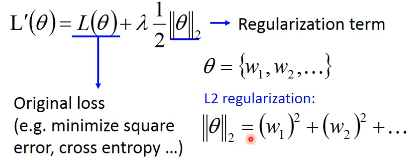
3.2 Regularization
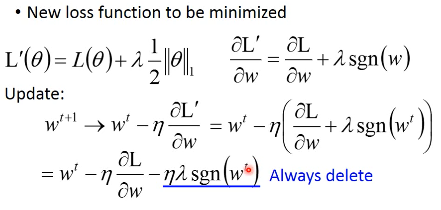
New loss function to be minimized:
- Find a set of weight not only minimized original cost but also close to zero
3.2.1 L2 Regularization
 Regularization: usually not consider biases
之前讲过 regularization 是为了让函数更平滑,但 ‘b’ 通常是跟函数平滑程度没有关系的。
Regularization: usually not consider biases
之前讲过 regularization 是为了让函数更平滑,但 ‘b’ 通常是跟函数平滑程度没有关系的。


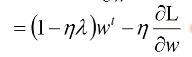
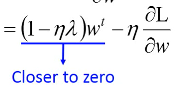
Closer to zero, 离 0 越来越近因为 η,λ 都很小,1 - η*λ = 0.99 所以每次做更新,都是把 wt 先乘以 0.99 这样某一个前面的 w, 比如 w1 因为每次都要 *0.99,所以会越来越靠近 0
3.2.2 L1 Regularization
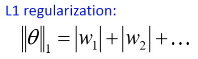

3.2.3 L1 和 L2 有什么不同
一样的,always decay ==> always delete 在 L2-regularization 中,如果出现很·「大」的 w,由于是·「按比例」缩放所以 w 会很·「快」的变小。在 L1-regularization 中,如果出现很·「大」的 w,由于是·「按量」缩放所以 w 会很·「慢」的变小。
在 L2-regularization 中,如果出现很·「小」的 w,由于是·「按比例」缩放所以 w 会很·「慢」的变小。在 L1-regularization 中,如果出现很·「小」的 w,由于是·「按量」缩放所以 w 会很·「快」的变小。
所以总体来说,L1 产生的 w 矩阵会比较·「稀疏」,既有很大的 w,也有很多(=0)的 w 所以总体来说,L2 产生的 w 矩阵会比较·「稠密」,大部分 w 都不大或者接近 0(!=0)
CNN 里面想产生 sparse 的结果的 image,所以用 L1
TODO: https://www.youtube.com/watch?v=sO4ZirJh9ds&index=64&t=109s&list=WL 这个教程很好,似乎 regularization 引出了 convex optimization 的某些概念
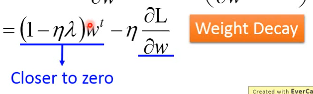
3.2.4 Regularization - weight decay
跟人脑的机制很像。
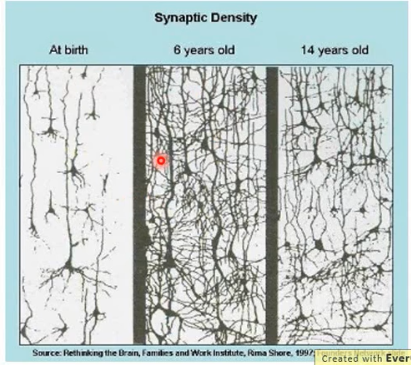
6 岁初识世界,很多都感兴趣,会建立大量的神经连接。但是到 14 岁,由于很多神经元都用不到,也有很多事情不去玩了(类比没用的 weight 不去 update,就会慢慢 decay 到 0)所以很多神经元连接就消失了。
3.3 Regularization vs. Early stopping
虽然在 NN 中 Regularization 有些帮助,但是帮助不是很大,没有像 SVM 这么依赖 regularization。
我们一般给 NN 的参数初始值都是很小的,或者接近于 0 的。我们下面做的事情就是让这些参数离 0 越来越远。
Early Stopping 是减少·「离 0 的次数」 Regularization 是减少·「离 0 的步幅」
总体来说都是让参数·「不要离 0 太远」
3.4 Dropout
3.4.1 Traning
=====
在每一次更新 w 之前,对 layer 做 sampling—决定要不要丢掉
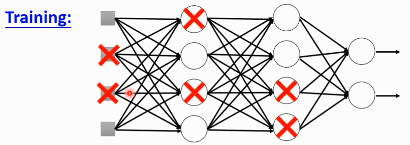
这样每一次 update 之前都要做一次 sampling,都改变了 structure, 所以你每一次做 update 的 w 都不一样,要 traing 的 NN 也不一样。
Each time before updating the parameters
- Each neuron has p% to dropout ===> The structure of the NN is changed
- Using the new NN for training
- For each mini-batch, we resampling the dropout neurons
在训练的时候,很明显 dropout 削弱了模型的能力,所以使用 dropout 之后,训练效果会变差所以,一定要确保在使用 dropout 之前,是训练集效果很好,测试集效果不好,才能使用。如果 训练集 本身就不好,那么 dropout 只会让训练集越来越差。
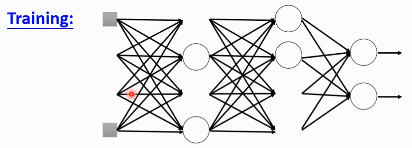
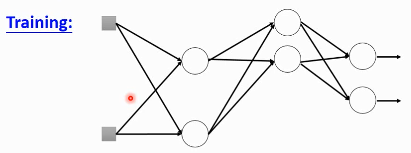
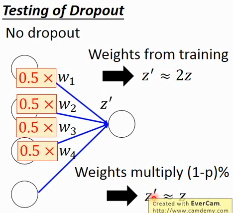
3.4.2 Testing
=====
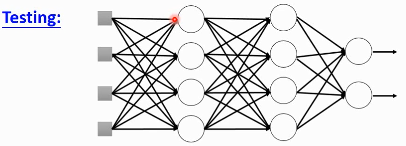
No dropout:
- if the dropout rate at training is p%, all weights times (1-p)%
- assume that the dropout rate is 50%, if a weight
w = 1at training, setw = 0.5for testing
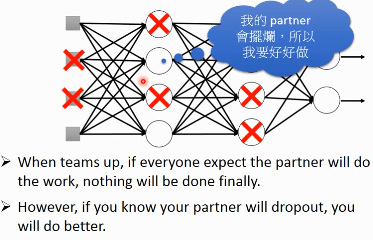
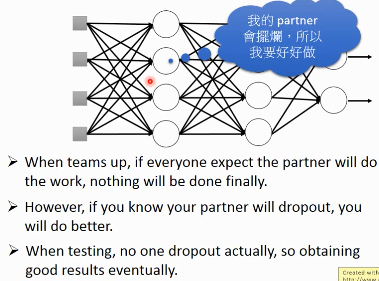
3.4.3 Why dropout work
– Intuition Reason

3.4.4 Why multiply (1-p)%
different weight in training and tesing
如果不乘以(1-p)%, 那么 training 和 testing 的输出不一致,这样 testing 反而会不好所以需要乘以(1-p)% 来大概的保证结果是一致的。
一个更学术的理由:
3.4.5 Dropout is a kind of ensemble
Ensemble Learning 在比赛中很常用,
3.4.6 Ensemble Learning 为什么 work
之前讨论过 error 来自于两个方面:bias , variance
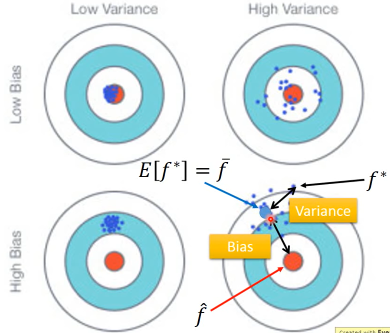
如果模型能力强:bias 造成的 error 小,variance 造成的 error 大如果模型能力弱:bias 造成的 error 大,variance 造成的 error 小
所以如果有很多能力较弱的 model,平均起来看,可以消去 bias 造成的 error 所以如果有很多能力较强的 model,平均起来看,可以消去 variance 造成的 error
而且还可以利用 parallel 来 traing 各自的 model
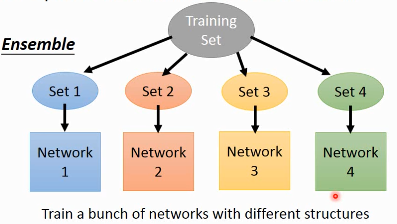
注意这里是把 training data 分成几份,所以每个子训练集都不一样
RandomForest 就是实践这种精神的一种方法,每一个 DecisionTree 随便 train 一下都会 overfitting,但是当很多 DecisionTree 放在一起的时候,就不容易 overfitting
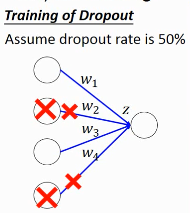
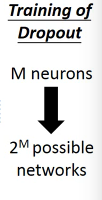
3.4.7 Training of Dropout
========================
Dropout will produce many different structure of NN
因为每个 minibatch 在进行 update 的时候,都会做一次 sampling 产生出不同的 structure 因为这种 sampling 会作用在所有的 神经元,当然也包括 input-layer,所以,每次的输入也被 sampling 成不同的‘输入’,所以完全可以看成是上面的 ensamble learning 的重现。
different input + different structure
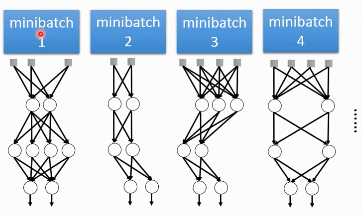
- using one mini-batch to train one network
- some parameters in the network are shared
虽然一个 network 使用 一个 mini-batch 来 train 但是某一个神经元,有可能出现在好几个 mini-batch 中,所以这个神经元就是被·「好几个 mini-batch」train 的。
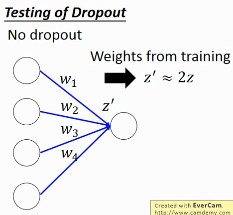
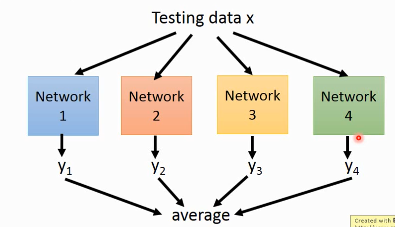
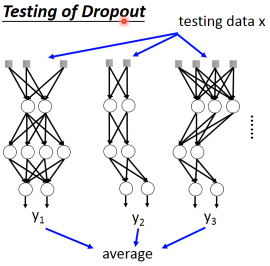
3.4.8 Testing of Dropout
======================
所以,根据 ensamble leanring,应该这么做,但是 sampling 是随机的,这样做很不现实,不效率
所以采用一种近似的方法:weight*(1-p)%
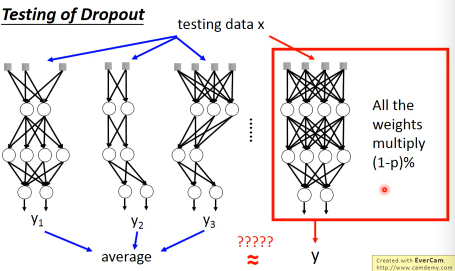
为什么可以‘约等于’呢?举例说明
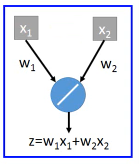
Dropout(ensamble) will produce:
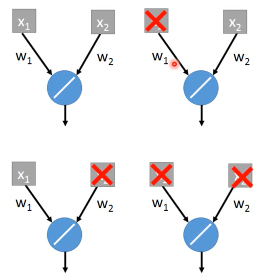
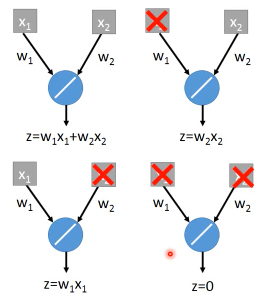
ensamble will average the all z: (w1x1 + w2x2 + w2x2 + w1x1 + 0)/4 = 1/2w1x1 + 1/2w2x2
dropout will weights*(1-p)% :
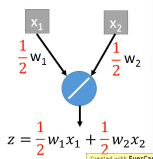
ensamble average and dropout weight*(1-p)% will be equall
但是很明显,不会所有的 dropout 方法最后都和 ensamble 方法的结果相同。 只有 linear 的 NN 才有可能产生这种结果。
所以有些人
3.4.9 获得了这样的灵感
既然只有 lienar nn 才能让 dropout 产生和 ensamble 完全相同的结果。那我干脆就使用 linear NN 效果肯定更好。
比如使用激活函数为 ReLU or Maxout,这样的 NN 在使用 dropout 之后效果肯定非常好。
实际上确实如此。以为内 ReLU 和 Maxout 的激活函数跟 linear-fn 很相近